产品中心
产品分类
产品分类
品牌标签
品牌标签


产品介绍
BORA六足机器人是一款紧凑型六自由度平行机构系统,可实现0.1微米分辨率的精细元件定位与调节。
BORA六足机器人满足光学与纳米技术领域对分辨率、精度、稳定性和尺寸的严苛要求。
其紧凑尺寸可集成于狭小空间,例如安装在测角仪顶端用于同步辐射光束线应用,或搭载于地面光学设备以校准空间光学元件。
BORA六足机器人支持任意方向操作:垂直、水平、倒置皆可。
性能特点
max负载能力 10 千克
线性行程范围 ± 20 毫米
角度行程范围 ± 15 度
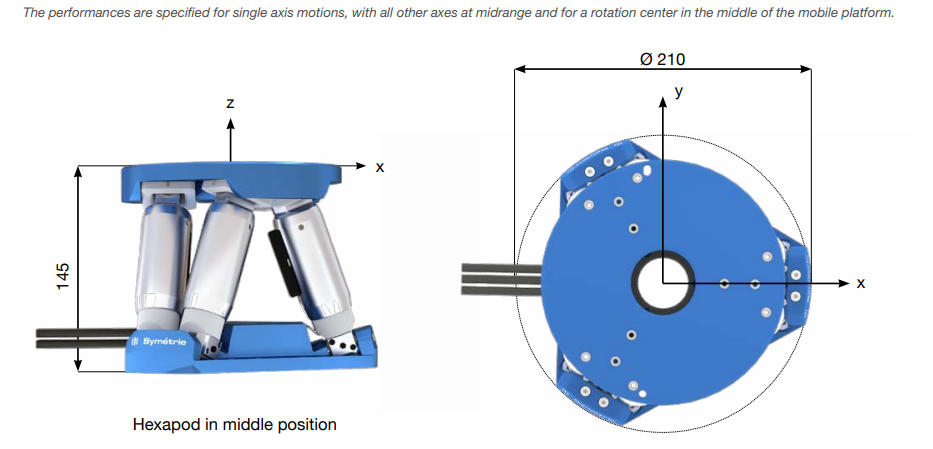
中间位置高度 145 毫米
技术参数
|
产地 |
加拿大 |
|
行程范围 Tx, Ty (mm) |
± 20 |
|
行程范围 Tz (mm) |
± 10 |
|
行程范围 Rx, Ry (deg) |
± 10 |
|
行程范围 Rz (deg) |
± 15 |
|
分辨率 Tx, Ty, Tz (nm) |
0.05 |
|
分辨率 Rx, Ry, Rz (μrad) |
1 |
|
重复定位精度 Tx, Ty (μm) |
± 0.15 |
|
重复定位精度 Tz (μm) |
± 0.15 |
|
重复定位精度 Rx, Ry, Rz (μrad) |
± 2 |
|
速度 (mm/s; deg/s) |
2; 2 |
|
刚度 X, Y (N/μm) |
1 |
|
刚度 Z (N/μm) |
10 |
|
负载能力 (kg) |
10 (垂直方向) |
|
5 (水平方向) |
|
|
电机类型 |
直流电机,齿轮箱 |
|
工作温度范围 (°C) |
0 至 +50 |
|
材料 |
铝、钢、不锈钢 |
|
移动平台尺寸 (mm) |
Ø160 |
|
中心孔径(mm) |
移动平台 Ø43 |
|
固定平台 Ø36 |
|
|
中位高度(mm) |
145 |
|
重量(kg) |
4.3 |
|
电缆长度,米 |
3 |
|
可选配置 |
洁净室兼容性 |
|
低温兼容性(低至-40°C) |
|
|
真空兼容性 |
|
|
控制器类型 |
ALPHA |
|
接口 |
以太网,USB |
|
电源 |
110-240 VAC / 50-60 Hz |
产品应用
仪器仪表
光学
测试实验室
航空航天
计量学
半导体
同步加速器:样品、KB镜定位




 苏州长显
苏州长显