产品中心
产品分类
产品分类
品牌标签
品牌标签
NanoPos六足机器人正在欧洲同步辐射设施(ESRF)的ID11新型纳米显微站定位样品。ID11是专用于中至高能衍射及成像研究的束线,可对各类具有物理、机械或化学特性研究价值的系统进行分析。在斯德哥尔摩大学的实验中,一台兼容高真空的NanoPos正在10⁻⁹毫巴真空腔室内定位样品。
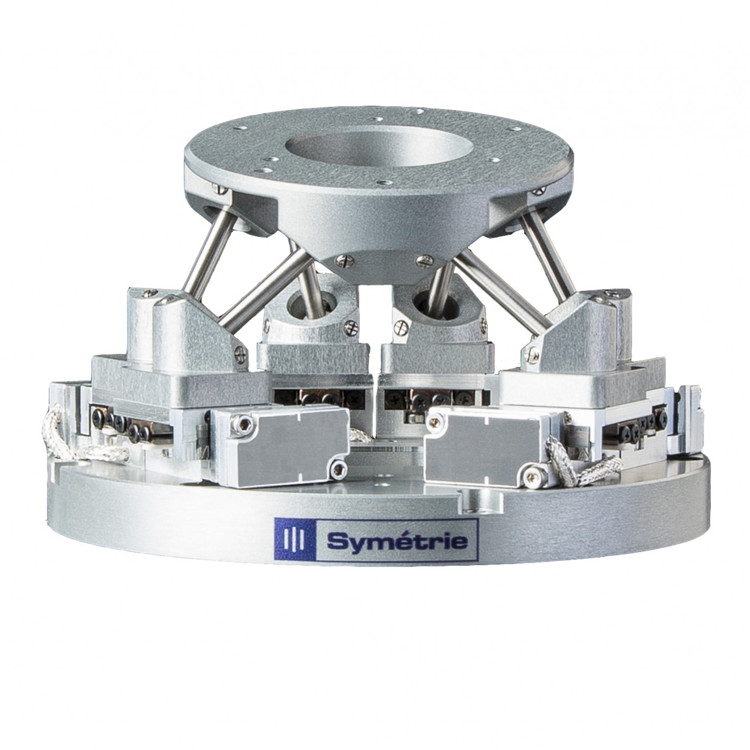
NanoPos是一款高度仅68毫米的微型六足机器人,可在6自由度范围内以10纳米分辨率实现精细组件的定位与调节。
NanoPos六足机器人凭借其卓绝特性在微型领域脱颖而出,这得益于其集成了知名美国制造商的超紧凑压电平台、高品质关节及低摩擦机械部件。
其闭环控制系统配备线性光学编码器,可实现高精度性能。
提供高压(HV)和高真空(UHV)版本。
max载荷能力 500 克
线性分辨率 10 纳米
角分辨率 1 微弧度
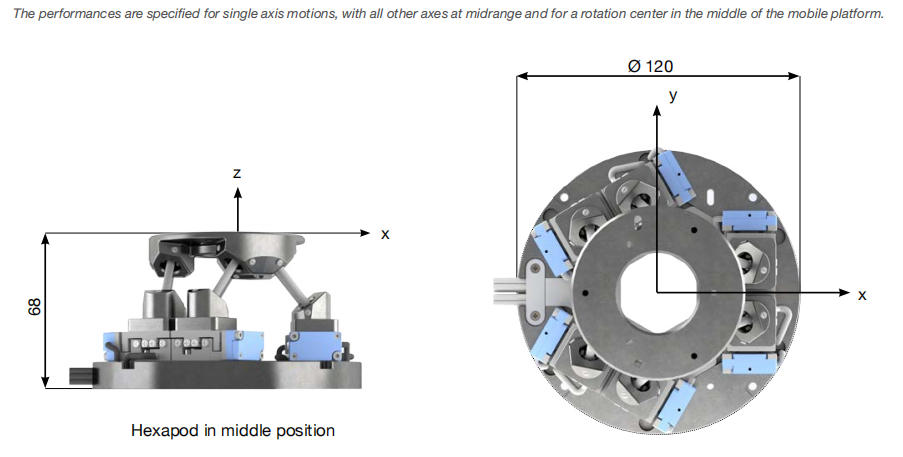
中间位置高度 68 毫米
|
产地 |
加拿大 |
|
运动与定位 |
行程范围 Tx, Ty (mm):± 5 |
|
|
行程范围 Tz (mm):± 4 |
|
|
行程范围 Rx, Ry (度): ± 7 |
|
|
行程范围 Rz (度):± 10 |
|
|
分辨率 Tx, Ty, Tz (纳米):10 |
|
|
分辨率 Rx, Ry, Rz (微弧度):1 |
|
|
重复性 Tx, Ty, Tz (纳米):± 75 |
|
|
重复性 Rx, Ry, Rz (微弧度):± 2 |
|
|
速度 (mm/s; deg/s):1; 1 |
|
负载能力 (g) (垂直方向) |
500 |
|
电机类型 |
压电电机 |
|
工作温度范围(°C) |
+5至+40 |
|
材料 |
铝、因瓦合金、陶瓷、不锈钢 |
|
移动平台尺寸(mm) |
Ø72 |
|
中心孔径(mm) |
Ø32 |
|
中位高度(mm) |
68 |
|
质量(g) |
505 |
|
电缆长度(米) |
1.2 |
|
可选配置 |
定制平台设计 |
|
|
更大行程范围 |
|
|
可扩展尺寸 |
|
|
真空兼容性 |
|
|
非磁性 |
|
控制器 |
控制器类型:CAPELLA |
|
|
接口:以太网、USB、串行(RS-232) |
|
|
电源:110-240 VAC / 50-60 Hz |
仪器仪表
光学
测试实验室
显微镜技术
纳米技术
半导体
加速器




 苏州长显
苏州长显