产品中心
产品分类
产品分类
品牌标签
品牌标签


产品介绍
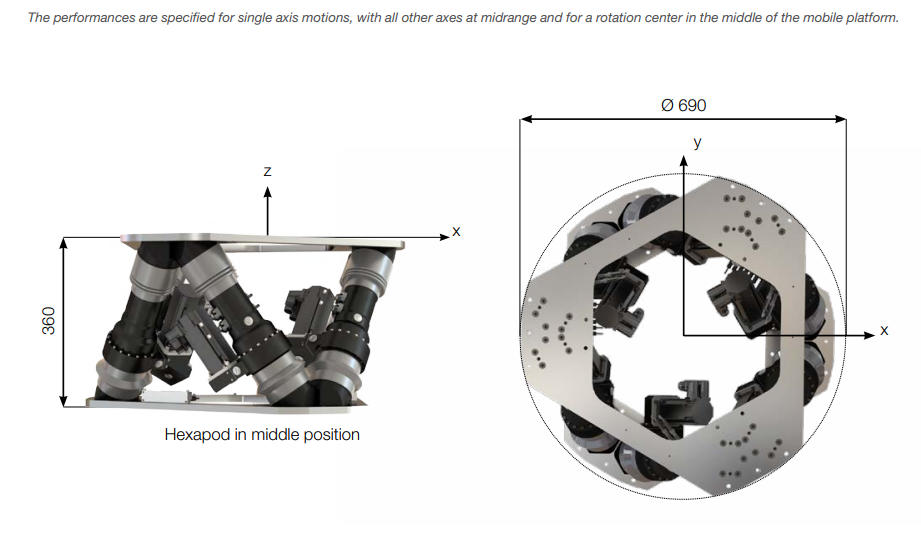
SURES六足机器人是一款精度高且刚性出彩的定位系统。它能够以高分辨率和低交叉耦合(寄生运动)的方式,对重达500千克的物体进行调整和安装。
SURES六足机器人特别适用于航天、天文及望远镜领域。例如可对地基望远镜的M2和M3主镜进行校准,通过准确重新对准来补偿夜间因重力变化和温度波动导致的结构变形。
该设备的机械与电子组件均针对低温环境设计,因多数地基望远镜安装于高海拔山顶。
性能特点
有效载荷能力高达500千克
分辨率0.1微米
低交叉耦合运动
可在任意方位运行
技术参数
|
产地 |
加拿大 |
|
行程范围 Tx, Ty (mm) |
± 8 |
|
行程范围 Tz (mm) |
± 6 |
|
行程范围 Rx, Ry (deg) |
± 1 |
|
行程范围 Rz (deg) |
± 1 |
|
分辨率 Tx, Ty, Tz (μm) |
0.1 |
|
分辨率 Rx, Ry, Rz (μrad) |
1.5 |
|
重复定位精度 Tx, Ty (μm) |
± 0.5 |
|
重复定位精度 Tz (μm) |
± 0.25 |
|
重复定位精度 Rx, Ry, Rz (μrad) |
± 1 |
|
载荷能力 (kg) |
高达500 (0°至90°倾角范围内) |
|
电机类型 |
带Absolutely值编码器的无刷电机 |
|
工作温度范围 (°C) |
-20至+40 |
|
湿度水平 (%) |
高达100 |
|
适用材料 |
铝、钢、不锈钢 |
|
移动平台尺寸 (mm) |
Ø690 |
|
中位高度(mm) |
360 |
|
重量(kg) |
117 |
|
电缆长度(m) |
10(可定制加长) |
|
控制器类型 |
ALPHA定制版 |
|
接口 |
以太网、USB |
|
电源 |
110-240 VAC / 50-60 Hz |
产品应用
光学望远镜中M2或M3镜的定位
射电望远镜中次级反射镜的定位
光学调整




 苏州长显
苏州长显